Micro-UAV Augmented 3D Tactics
Christopher Flaherty
Introduction
Merging current trends in the use of small drones or unmanned aerial vehicles (UAV) at the micro-aerial level, with the notion of three-dimensional (3D) tactics, will be examined as a future possibility for lone combatants on foot to operate one or possible more small UAVs as an extension of his or her own means to combat an opponent. Written as a tactics, techniques and procedure (TTPs) analysis, this paper attempts to extend the notion of 3D tactics in the context of new and emerging technology. The paper will also look at the implications for modelling the observe-orient-decide-act (OODA) loop decision making process.
Pairing the Micro-UAV and Lone Combatant-Controller
The object of this paper is to look at the merging of a lone combatant on foot, with their own micro-UAV, to operate as a bilocated entity: that is an entity located in two distinct places at the same time. This union of human and UAV team is a sub-set of the anticipated near-future use of a swarming force of UAVs that provide additional force options (Williams, 2018). As an integration question from the perspective of the lone combatant the technology shift in more recent years offers the possibility to radically augment the application of 3D tactics. It is envisaged that a pairing between a micro-UAV and lone combatant-controller is based on the following scenario:
“Smart Glasses and Virtual Reality Goggles: UAVs are typically flown using handheld controllers like those used for model airplanes, with the pilot observing the drone from a distance. This form of stand-off piloting is functional when the UAV is being flown in noncomplex terrain such as in open fields, and to a limited extent over urban areas, when pilot line-of-sight is maintained. An immediate drawback to this method of UAV control is pilot perspective—they are viewing the drone from afar—which reduces its tactical maneuverability and handling. To overcome this limitation, hobbyist and commercial UAV pilots have taken to using smart glasses (with see-through lenses that have computer imagery projected on them) and virtual reality goggles and visors that creates computer-generated three-dimensional (3D) simulations of what a drone sees in front of it via a video camera system. This merges the perspective of the stand-off pilot with the UAV—in essence, placing him in the drone or allowing him to become the drone for flight control purposes. The end result is that tactical mobility greatly increases” (Bunker, 2015).
It is open to possibility, that the use of smart glasses and/or virtual reality goggles by a lone combatant-controller on foot is used to simultaneous engage an opponent from two different directions, controlling their micro-UAV companion, while they themselves engage from their direction. A scenario such as this creates a micro-level version of traditional helicopter battles where these craft interoperate at low altitude with their companion foot troops. In this particular scenario the lone combatant-controller operates bilocated, and through a bifocal view, in dual-action commanding two weapons platforms: him/herself (as a combatant), and his/her micro-UAV as an additional combat entity. The tactics envisaged operate through full-volume space, and over an attack surface.
Background Review of Three-Dimensional (3D) Tactics
An early formulation of 3D tactics identified transitioning from line tactics in the sailing and battleship eras, which were largely two-dimensional (2D) in tactical terms arising to the 3D tactics of the modern naval aviation and submarine era (Fioravanzo, 1979). At its simplest form, 3D tactics serve as an extension from a ground view of an engagement incorporating three-dimensional aspects such as above ground air space, and subterranean building systems, such as shopping malls, transport, parking and service tunnels in urban spaces.
Operating as a sub-set of fourth (time) and fifth (cyberspace) dimensional operations 3D tactics is the notion that highly complex urban structures incorporating features such as multi-level buildings, open spaces between buildings, crowd congregation points, and transport hubs within the central business district constitutes a far too complex environment from a conventional 2D tactical perspective to analyse (Flaherty, 2009; Flaherty and Green, 2008; Flaherty, 2008; 2007a; 2007b; 2006). 3D tactics writing has in part been a critique about the capacity of traditional tactical language to impart the notion of simultaneous action, and its capacity to describe a complex environment where the action moves from the traditional notion of see-and-shoot into a much more complex sphere of multi-level and directional movement and engagement in full-volume space.
In a conventional sense, the 2D tactical paradigm thinking is embedded in sequential based linear concepts that mirrors a commonly perceived world as also two-dimensional. Whereas, the 3D tactics concept is intended as a framework to understand the tactical urban battle-scape given:
“the ability … to carry out omni-direction spatial manoeuvre…. [Where] … actors have the power to rapidly shift between material, cyber, social, and political spaces. They do not recognize front and rear lines.” (Sullivan and Elkus, 2009)
The pairing of a small UAV and lone combatant-controller is intended to give better realisation of the new tactical language needed to engage an objective or target multiple objectives simultaneously in full-volume space.
The following figure illustrates a dual attack by a paired micro-UAV and a lone combatant-controller, against one on more objectives in 3D full-volume space, over a potential attack surface.
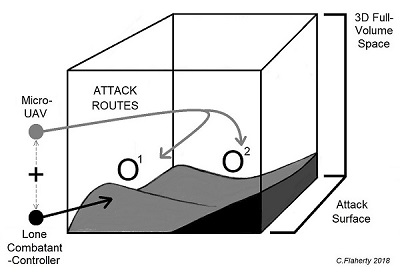
Figure 1: Dual Attack Routs by Paired Micro-UAV and Lone Combatant-Controller
Utilising the Micro-Aerial Level
Conventionally, when we talk about the third dimension to tactics we commonly refer to the airspace above terrain (Lawes, 2006). In the context of the third dimension to an urban environment this is the full three-dimensional solid forms of buildings and spaces between buildings. Operating in this environment, the current tactical understanding identifies a need to practice spherical security (Flaherty, 2008). That is, agents move in an urban environment no longer having the luxury of a rear area and must maintain a tactical bubble (Ackerman, 2001).
The concept of simultaneous tactical actions (Simpkins, 1985), pre-figures the 3D tactics paradigm. The merging of the micro-UAV and the lone combatant-controller brings about a reconceptualization of the basic tactical presumptions such as what constitutes cover from view, or from fire. Pairing of a micro-UAV and the lone combatant-controller effectively allows bifocal surveillance and engagement of an opponent from two or more angles simultaneously, as well as active engagement by the same actor from two or more directions at once. Subjecting an opponent to a barrage of continuous simultaneous actions, from multiple directions, within full-volume space.
An important philosophical distinction between 2D and 3D tactics is that each methodology accomplish different kinds of objectives. 2D tactics can be focused on achieving possession goals, whereas 3D tactics tend to seek disruption, and hence denial-of-use. Traditionally, 2D tactics are designed primarily to control a specific line-of-sight. However, in complex space, which is information rich and overwhelming, these tactics offer limited options, in particular are limited in term of movement physically from one goal, to the next.
The cultural change required by the 3D tactics paradigm calls for a capacity to think tactically and reading the environment in terms of simultaneous events and actions, all directed by the same lone combatant-controller. Augmenting 3D tactical analysis with the pairing of micro-UAV and the lone combatant-controller achieves a significant technical breakthrough in allowing an individual actor to fully operate visually with the aid of a device such as the smart glasses and/or virtual reality goggles to reconceptualise land tactics that operate three-dimensionally, as a fundamentally different pursuit from conventional 2D tactical analysis.
Attack Surfaces
Use of the high-manoeuvrability of a micro-UAV achieves another of the predicted outcomes of 3D tactics methodology namely effectively exploitation of erratic movement, over what is notionally called an attack surface. The concept is taken from computing sciences notion of a system’s attack surface, which is conceptualised as a set of ways in which an adversary can attack a system and potentially cause damage (Manadhata, Kaynar, and Wing, 2007). Conceptually, attacks either follow an avenue of attack (specifically targeting a system component) or attack generically any number of given points over a systems’ surface. Axiomatically, it can be said, the greater the surface, the greater that must be defended. Conversely, viewed from a conventional 2D tactics perspective, the reliance would be on finding an avenue for attack, that is focused on a particular objective, perceived to be strategically important.
Taking the computing sciences analogy to differentiate key difference between the 2D and 3D tactics paradigms the following table lists a set of key differences between 2D and 3D tactics (Flaherty, 2009).
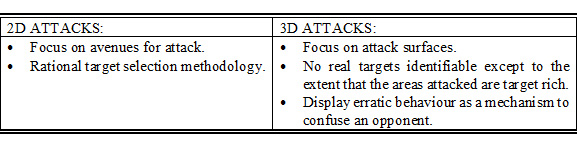
Table 1: Difference Between 2D and 3D Attacks
3D tactics methodology is primarily designed for operating over an attack surface. Seeking to exploit an inherently greater number of opportunities. Deception and timing advantages are gained, as an opponent (as a defending force) is psychologically ill prepared to meet a surface attack, because targets cannot be easily defined or comprehended. Additionally, there is usually no comparative target selection methodology to consider, thus adding to deception and confusion.
2D approaches are still largely embedded in concepts of, “linear security common to conventional land operations.” (Ackerman, 2001) Conventional 2D land tactics are constructed from staged base components, namely: sequential actions, and line-of-sight analysis. The corollary to this is that an opponent (as a defender) is practically prevented from a successful surface defence, unless some type of strategic defence shield is set up. Such a shield is technically hard to achieve, and in practical terms highly resource intensive.
Presented diagrammatically in Figure 1, the attack surface contains a number of potential objectives, shown as O1, and O2. Using a 3D tactics approach, an agent attacking has relative freedom to choose any target or can just erratically assault any target through a rhizome manoeuvre, identified in Figure 1 as the over-arching arrow connecting the attack route to the objectives. It is argued that a defending opponent can be overwhelmed being unable to protect from the attack, as they are spread out covering other potential targets. This manoeuvre in classical terms is known as the dislocation of an opposing force.
The rhizome manoeuvre developed under 3D tactics is pre-figured by older notions of movement along the line of indirect approach. The difference is the reliance on erratic behaviour, such as operational swarming; intending to create: ‘multiple centres of disorder at the same time, and in same manner’ (Sullivan and Elkus, 2009). Intended to generate information deception and throw an opponent off its OODA decision cycle.
The paired micro-UAV allows its combatant-controller to extend beyond conventional 2D tactical paradigms, through expansion into the third dimension of over-height (and even underground) in the urban landscape of high rise buildings, under street access and multi-level areas of movement. Opponents face not only the problem of surface-based attacks but as well must contend with the asymmetrical elements of overhead and subsurface threats, including erratic and unpredictable rhizome manoeuvre. Creating a true example of asymmetric advantage. The uncertainty of whether or not a potential opponent is actually there, and this uncertainty profoundly affects the OODA loop decision making process.
The capacity for full utilisation of attack surfaces in 3D tactics is based on the informational component, in any of the typical tactical plays: attacker and defender; attacker and attacker; or, defender and defender. Pairing the micro-UAV and the lone combatant-controller in a potentially target rich environment behaving erratically achieves surprise and deception through a series of rhizome manoeuvre. Forcing an opponent to spread thinly over a large area in order to have forces present to interdict an opponent, if they are attacked.
Boyd’s OODA Loop and Micro-UAV Augmented 3D Tactics
The pairing of a micro-UAV and a lone combatant-controller in terms of augmenting 3D tactics increases the unpredictability of random attacks, increases uncertainty and can be part of the deception which impacts on the effectiveness of an opponents’ own OODA decision cycle. On the other side of the equation, the pairing of micro-UAV and combatant-controller may alter the traditional OODA loop construct. The original ODA (observe, decide, act), which later became OODA analysis was analogist with aerial combat at high-speed, the augmentation with the micro-UAV somewhat returns to the original phenomena. The lone combatant on foot becomes a virtual pilot. Having an aerial view of events, simultaneously as they view from their ground perspective: requiring them to handle two very different tactical problems at the same time; and handle two separate OODA loop decision cycles. This orientation shifts to the bifocal situation of the lone combatant who is simultaneously exercising two views of the battle: one aerial, and one from the ground, creating effectively a three-dimensional double OODA loop, which is illustrated below in Figure 2: illustrating multiple OODA loop configurations operating simultaneously.
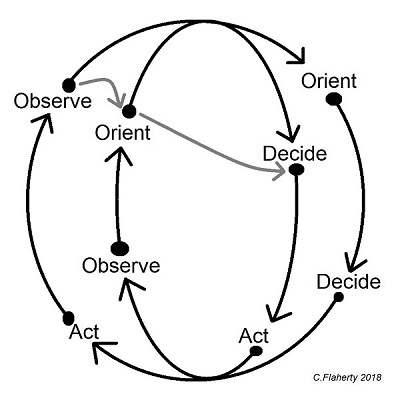
Figure 2: Multiple OODA Loop Configurations
Paired with a micro-UAV controlled with smart glasses and/or virtual reality goggles the same actor operates with a bifocal view, through multiple OODA loop configurations. The traditional formulated sequence of observe-orient-decide-act, which is a largely two-dimensional construct begins to rapidly reformulate into many different combinations, some in reverse order, others a truncated decision either leading to action, or no action depending of the flow of engagement; as is illustrated by the new observe-orient-decide axis indicated in Figure 2.
A bilocated, and bifocal view of the battle by the human and UAV team may allow for anticipatory-action to develop much closer, if not before, the decisive point in pre-emption of an opponent’s potential next move, interdicting at the, ‘juncture point between when an action takes place, and its prior anticipation’ (Flaherty, 2003a).
The double OODA approach visualises the complexity of a multidimensional tactical problem. Conceptually, combining spherical security concept and simultaneous tactical actions allows us to conceptualise a tactical equation where people no longer rely on line-of-sight analysis, that is, essentially think within a 2D paradigm, but instead adopt a new concept of full-volume analyses.
The pairing of the micro-UAV and lone combatant-controller may also present two tactically different pictures of the same event. For instance, in aerial combat, the controller as virtual pilot will know in a 3D full-volume space where the opponent is. However, in a complex urban environment for instance, at the ground perspective the opponent can easily be lost, even if at first detected. This may allow the combatant, as controller to opt for engagement via the UAV only, rather than attempt a dual simultaneous attack.
A concern with the bifocal picture of the battle for a lone individual, is that the data overload becomes more extreme. The aim of the 3D aspects of the OODA loop construct, and doubling or more for a single actor, is to seek continuous simultaneous review of the entire space surrounding a target (Flaherty, 2008; Flaherty and Green, 2008); however, this impacts on tactical development significantly from an informational view. If viewed in term of spherical security problematically this approach which links multiple objectives, and opportunity factors, can ultimately be self-defeating in terms of overwhelm. One view may be that a paired micro-UAV and its lone combatant-controller is able to outrun information overwhelm, before it becomes decision paralysing, by ignoring it altogether, and opting instead to opportunistically, and erratically keep contacting the opponent as a brute-force style of attack; in effect going into tactical free-fall. Called the chaotic battle approach, this seeks to create a completely unplanned, and frenzied form of attack and defence between two opponents – victory only being achieved with annihilation, or exhaustion of one of the sides, leading to surrender.
Interdiction and Rhizome Manoeuvre
Using the micro-UAV gives its combatant-controller access to the micro-aerial level to undertake rhizome manoeuvre, in a new way from how this tactic is conceptualised. The micro-UAV becomes a mechanism for virtual rhizome manoeuvre through full-volume space by its controller. Technologically presenting new opportunities realising, “fluid operational space” (Sullivan and Elkus, 2009). This reconstitutes the tactic from its traditional formulation. Rhizome manoeuvre developed in the context of Israel Defense Forces’ operations involving small decentralized forces moving at speed through the three-dimensional urban space as if it is without walls, floors, or ceilings outside of the normal linear routes, such as streets, doors, windows, and stairs that make up buildings (Flaherty, 2010). However, doing so often required brute-force battering through structures with shaped charges, and sledge hammers. Shifting rhizome manoeuvre to a micro-UAV may achieve the goal of movement that is truly unobserved, and unexpected (Flaherty, 2009).
Randomised Defence Strategy as a Counter to 3D Tactics
Potentially, a paired micro-UAV and its lone combatant-controller augmented 3D tactics gives the ability to move toward a potential objective dynamically. Utilising the capacity of a UAV to erratically and deceptively move toward its objective from maximum, or extreme angles achieves,
“deception and counter-deception, as well as swarming and counter-swarming” (Sullivan, 2005).
A key attribute of successful 3D tactics is approaching an objective with minimum of effort achieved through successful mimicking and deception (Flaherty, 2003b). An opponent using conventional target theory cannot effectively orient and decide to act. The only option is for the actors to adopt some form of dynamic or randomised pattern of defence which could effectively minimise the tactical advantage of an erratically moving opponent. This would mean that effectively engagement and defence was in part relying on pure happenstance or coincidence to thwart any potential approach.
One possible counter to a paired micro-UAV and its combatant-controller is to adopt a concept of operations adapted from the classical randomised defence strategy (Neumann and Morgenstern, 1944). Game theory posits that a randomised defence can be achieved introducing a confusion element, either dynamically randomising defence parameters or controls using redundant representations or deception (Barbosa and Page, 2005). Couched in terms of a deterministic game, that directs an opponent’s next defensive move, based on the history of the moves made in the game so far (Mowbray, 2008). A problem with this approach to game theory is that past precedence is used as a means for deciding the randomising strategy. However, where deception is used to gain advantage other subjective elements, which have no basis in previous events, add to the chaotic and disordered situation that the opponent finds themselves.
Given the close relationship in 3D tactics methodologies with older concepts of taking the least resistance route one possible solution open to the opponent as a defender is to pre-identify possible indirect approaches to intended objective, or objectives on an attack surface. Consideration of various influence issues, that might operate to confine an agent’s choice of a particular line of least resistance, such as: avoiding contact or collision with other agents, or obstacles located along the movement line. Such an approach might successfully anticipate the line of approach of an agent, allowing it to be intercepted before it reaches its target, or as close as possible to its place of origin in 3D space (Flaherty and Green, 2008).
A draw-back with pre-identification of possible lines of least resistance is that given the fluid possibilities of the full-volume space, made possible by the pairing of a micro-UAV and its lone combatant-controller any conceivable approach could be considered. Implicitly, all agents would need to approach operating as if under a dome of surveillance, and possible movement omni-directionally; effectively dissolving the traditional notion of front and rear in operations. All movement becoming based on aerial virtual rhizome manoeuvre.
Conclusion
A final concluding comment, the aerial surveillance offered by a micro-UAV to a lone combatant-controller gives several advantages, such as increased situational awareness. This platform gives effective over-the-horizon ability to observe a potential target, formulate an attack at distance, pre-emptively interdict, or add a force multiplier to the combat ability of the lone combatant-controller. However, this new type of individual combatant capability still needs to be developed effectively, including finding ways to avoid data overload, and develop complex advanced analysis systems like data fusion for effective use by an individual combatant-controller displayed in real-time on his/her’s smart glasses and/or virtual reality goggles.
References
Chris Flaherty and Tony A. Green, 2008. "3D Tactics, Interdiction and Multiagent Modelling." International Crime Science Conference, University College London, Centre for Security and Crime Science, 17-18 July.
Chris Flaherty, 2010. "Command, Influence and Information in 3D Tactics." Journal of Information Warfare. (9:1).
——, 2009. "2D Versus 3D Tactical Supremacy in Urban Operations." Journal of Information Warfare (8:2).
——, 2008. "3D Tactics and Information Deception." Journal of Information Warfare (7:2).
——, 2007a. "3D Tactics: An Advanced Warfare Concept in Critical Infrastructure Protection." International Journal of Emergency Management (4:1).
——, 2007b. "Mass Space Vulnerabilities Analysis in 3-D Tactics," International Crime Science Conference, 16-17 July. University College London, Centre for Security and Crime Science.
——, 2006. "3D Tactics: An Advanced Warfare Concept in CIP." C. Balducelli and S. Bologna. (Eds.), Proceedings CNIP’06 Workshop on Complex Network and Infrastructure Protection (Rome, 28-29 March). ENEA-Italian National Agency for New Technologies, Energy and the Environment.
——, 2003a. "International and Australian Pre-emption Theory." Australian Defence Force Journal (No.163).
——, 2003b. "Mimicking Operations." Australian Army Journal (1:2).
Giuseppe Fioravanzo, 1979. History of Naval Tactical Thought. Trans. A. Holst. Annapolis, Md.: United States Naval Institute Press.
Inger Lawes, 2006. "Land Force Air and Missile Defence: Dealing with the Complexities of Future Warfighting." Australian Army Journal (IlI:2).
John (von) Neumann and Oskar Morgenstern, 1944. The Theory of Games and Economic Behaviour, Princeton: Princeton University Press.
John P. Sullivan and Adam Elkus, 2009. "Postcard from Mumbai: Modern Urban Siege." Small Wars Journal, 16 February, http://smallwarsjournal.com/jrnl/art/postcard-from-mumbai
John P. Sullivan, 2005. "Terrorism Early Warning and Co-Production of Counterterrorism Intelligence." Canadian Association for Security and Intelligence Studies, CASIS 20th Anniversary International Conference, Montreal, Quebec, Canada.
Manuel Barbosa and D. Page, 2005. "On the Automatic Construction of Indistinguishable Operations" in N.P. Smart (Ed.) Cryptography and Coding. Cryptography and Coding. Lecture Notes in Computer Science, Vol. 3796. Berlin, Heidelberg: Springer.
Miranda Mowbray, 2008. "A Randomized Defence of Virus Throttling." Presentation at the Adaptive and Resilient Computing Security Workshop: ARCS 2008, BT Research Laboratories Future Technologies Group (30 September).
Pratyusa K. Manadhata, Dilsun K. Kaynar, and Jeannette M. Wing, 2007. "A Formal Model for a System’s Attack Surface." Paper: CMU-CS-07-144. School of Computer Science, Pittsburgh, PA: Carnegie Mellon University.
Richard E. Simpkins, 1985. The Race to the Swift: Thoughts on Twenty-First Century Warfare. London: Brasseys.
Robert J. Bunker, 2015. Terrorist and Insurgent Unmanned Aerial Vehicles: Use, Potentials, and Military Implications. Carlisle Barracks: Strategic Studies Institute, U.S. Army War College. https://ssi.armywarcollege.edu/pubs/display.cfm?pubID=1287
Robert K. Ackerman, 2001. "Training, Not Technology, Is Key to Urban Warfare," SIGNAL: AFCEA’s International Journal. May, http://www.afcea.org/signal
Sean M. Williams, 2018. "Swarm Weapons: Demonstrating a Swarm Intelligent Algorithm for Parallel Attack," OTH (Over the Horizon), 13 August 2018, https://othjournal.com/2018/08/13/swarm-weapons-demonstrating-a-swarm-intelligent-algorithm-for-parallel-attack/