Full-Auto Teddy Bear: Non-Lethal Automatons and Lethal Human Teaming to Increase Overall ‘Lethality’ in Complex Urban Environments
Jeremy D. McLain
Introduction

Source: "Cyber Bear" https://dantecyberman.
Military operations in dense urban environments present challenges to mission accomplishment. Many situations call for neutralizing enemy combatants that would use a (sometimes ‘protected’) building as defilade from allied direct fire. Merely identifying and distinguishing, tracking, and separating combatants from non-combatants is an almost impossible task given current operational paradigms. Paramount is the need to avoid civilian casualties.
The urban environment causes communications problems and line-of-sight limitations-bound situational awareness. Adversaries may hide amongst the civilian population and obfuscate logistical support among a network of safe houses and subterranean tunnels. When buildings are destroyed, obstacles are created. Room-to-room clearing of the urban battlefield is cumbersome and dangerous. The use of autonomous agents for non-lethal engagement would exploit technological trends in the commercial sector. Such trends comprise, but are not limited to, Internet-of-Things and sensor networks, Cloud storage, Big Data analytics, and ubiquitous internet. Military thrusts in GPS-denied, Electronic Warfare-hardening, and anti-tamper technologies enable future use of automated systems in integrated ways. Advances in, and novel uses of, non- lethal technologies paired with increasingly autonomous systems will enable advanced strategies.
Future systems in all sizes and configurations will be used for surveillance but can more actively participate. Ethically, there is controversy in the use of autonomous systems for lethal engagements. It may be preferable or even advantageous to utilize autonomous systems for non- lethal engagement and logistical support roles. The basis for killing in combat is from a human- to-human fight assumption. A human would have the need to defend himself “to-the-death,” thus a lethal response is appropriate. However, as robots do not need to defend themselves “to- the-death”, an automated lethal response may be inappropriate and can be counter-productive in many instances. However, utilizing autonomous systems for non-lethal engagement may enable maneuver in urban operations which would otherwise be unfeasible. With rules of engagement requiring high certainty for use of lethal force, reversible non-lethal effects may enable a lower certainty requirement.
Megacities and Non-Lethal Weapons
Increasing need for operations within the city will drive requirements for future non- lethal engagement. New methods for area denial, counter materiel, anti-access, and maneuver shaping within a cityscape will need to be developed. Novel delivery platforms such as Unmanned Aerial Vehicles/Unmanned Ground Vehicles (UAVs/UGVs) could be used in different ways to affect the engagement. Using such weapons in conjunction with psychological and cyber operations would shape outcomes in future urban fights. Research on individual and crowd behavioral psychology will feed better models for crowd behavior. As use of non-lethal technologies can mitigate collateral damage, it may save resources in the long-run. Not destroying areas will help gain local support in the battle for “hearts and minds.” Paradoxically, some categories of non-lethal weapons are more restricted in use than lethal variants1. Development of non-lethal weapons has been stymied not by technological but by political and legal considerations. Human-rights organizations have consistently lobbied against proliferation of non-lethal weapons2. However, use of non-lethal capabilities from unmanned platforms may offer a new paradigm for non-lethal engagements.
As some non-lethal weapons can be limited in effective range, UXVs can close the gap to engage targets with less standoff than required by humans. For instance, one can imagine policebots wielding non-lethal batons and other capabilities. In fact, in China, a police bot dubbed “Anbot” can shoot a Taser at subjects3. The use of aerial drones for non-lethal payload delivery also is a novel technique. In India, police have developed a drone which can shower crowds with pepper spray4.
The invention of innovative Concept of Operations (CONOPS) based on robotics capabilities will affect design and development of later platforms to enable better Tactics, Techniques, and Procedures (TTPs). Human-machine teaming behavioral dynamics will drive many design decisions. It is expected that much of the technology from the gaming industry would be leveraged to enable effective teaming. Already, new technologies such as virtual reality or augmented reality would be useful for remote operation of platforms.
Future Military Operations in Megacities
Technological advantage is largely degraded in urban settings. It has been, and can be, argued that because of US dominance in open areas, adversaries are forced to use cities as refuges and bases of operation against US forces. New technologies and doctrine will need to be used to cope in such situations. Stephen Graham, Professor of Cities and Society at Newcastle University, writes, “Given the inescapably Soldier intensive nature of urban operations, traditional attempts to occupy such cities become increasingly untenable - absent radical increases in the use of high-tech solutions to replace manpower” (emphasis added)5.
The following are several scenarios in varying detail which may illustrate ways in which automation technologies could be employed to not only ease the burden in urban warfare, but to create new paradigms of urban strategies.
Offensive Operations
Clearing a Building
Clearing a building room to room is a dangerous aspect of urban combat. The clearing of a room must be done with surprise, speed, and controlled violence of action6. A squad moves silently and unnoticed to the room to be cleared. They quickly enter the room in a certain order, maintaining maximum coverage of the room with fields of fire. Fire is disciplined in order to not engage noncombatants with lethal force. The team gains control of the room.
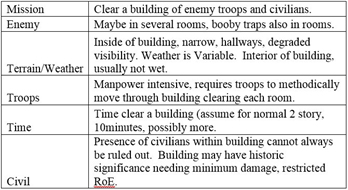
Figure 1 Notional METT-TC Analysis for 'Clearing a Building'
Combatants are disarmed, and wounded are segregated out for treatment. The room is searched for anything of value, such as intelligence or hidden contraband. The room is marked as ‘clear’, while assault teams move to next objectives.
Possible evolution of robots to clear buildings would take several stages. In the first stage, Intelligence, Surveillance, and Reconnaissance (ISR) bots would be used to ascertain where people are within rooms to reduce assault team risks. Stage 2 would consist of much improved stage 1 capabilities plus UXVs that could breach doors, perform rear-guard actions for assault teams, and guard stairwells. After these stages, robots could be developed which would conduct room clearance by themselves, utilizing non-lethal capabilities. Advances in robot ambulatory capabilities would allow independent locomotion to mission objectives, even in uneven ground such as in disaster-made rubble. Advanced robots would test doors for booby traps or scan rooms for contraband. In advanced tactics, one could have robots block whole floors while the assault teams leapfrog to the most important floor for engagement.
Assaulting a Building
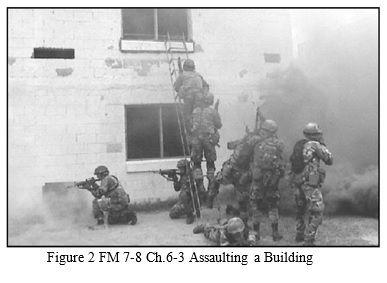
The initial assault of a building takes 6 basic steps. Firstly, routes to the building are pre-planned and then an Order of March is generated. En-route to the objective, other support units provide cover to the main assault team while it makes a breach point. While the breach is being made, support elements provide suppressive fire and isolate the building by covering avenues of approach. Smoke and obscurants are also used to cover movements of the breaching and assault teams. Civilians, Enemy Prisoners of War (EPWs), and casualties would be managed by support elements. Automated assault of a building would entail many elements working together. In initial planning, artificial intelligence agents would automatically plan a route based on real-time ISR conditions. The Order of March would be a dynamically changing interface with programmed waypoints which are reactive to what Soldiers/machines are doing and what commanders are ordering. Support units would have advanced situational awareness from ISR drones perched and roving along and around the route to the objective. Suppressive fire to cover assaulting troops could be automatic, non-lethal (if many civilians are in area), and ‘directed’ for lethal fire against enemy combatant positions. Displaced civilians, EPWs, and casualties could be taken away from areas in driverless vehicles to be further managed in rear staging areas.
First stages of automating the assault would be use of UXVs for non- lethal and (man-in-the-loop) suppressive fires to cover the breaching and assault teams. The next stage of development may entail the use of robots for the interiors of the building for ISR and room clearing effects. Breaching bots would be used to make an opening without putting breach teams in harm’s way. Humans would be with robots to direct and ameliorate areas where the UXVs would be awkward. In later stages of development, a building may be overtaken by swarms of robots with minimal human intervention. Combatants and non-combatants alike would be driven or captured from the building and taken away for sorting out in staging areas.
Holding a Building
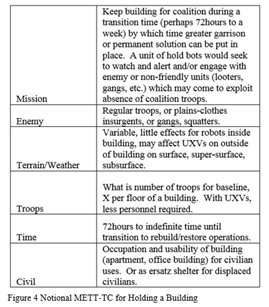
Another scenario in which robots would enable overall strategy is the “holding” of a building. In many cases, the warfighters that have cleared a building have to move on to the next objective leaving the building relatively undefended and thus vulnerable to insurgents re-taking it at some later point. Or in other cases, manpower has to remain to hold the building, requiring more personnel to hold an urban area. With the advent of robotic “sentries” and mobile ad hoc sensors networks, attacking forces may leave behind a garrison force of robotic sentries which would impede insurgents’ ability to retake buildings. A ratio often cited for manpower requirements in urban warfare vs. open terrain warfare is 5 or 6 to 17. A ratio of 50 has been used as a rule of thumb for occupation of an area vs. population density of the area8
The use of holding or sentry robots for assaults upon buildings allows assault troops to move onto assaulting the next objective, enabling faster paced urban warfare against an enemy occupying force. With automated stay-behind sentry forces, enough time is bought to allow assault elements to clear areas faster but also to deny a won area to the enemy. The first stage of development would comprise a skeleton crew of human handlers to keep watch over surface, super- surface, interior spaces of a building, or areas of buildings. Support logistics would be for limited times before resetting, such as for a 72 hour or week-long period.
An example scenario where such capability would have been useful is the moments following the liberation of Baghdad. During the 2003 invasion, much looting and destruction of government buildings (resulting in loss of important intelligence and artifacts) could have been prevented, delayed, or otherwise mitigated. More advanced capabilities would enable smaller form-factor UXVs for subsurface ingress sensing, monitoring, and reacting. Eventually, a swarm of “hold-bot” UXVs could hold a building indefinitely based on scavenging power and other supplies for a low- logistics foot print. Scavenger robots would emplace solar panels on a rooftop which would support sentries with ensured access to power. Such security infrastructure could be held in place to support civilian operations.
Overwatch and Movement
Troop movement within a dense urban environment is a challenge, especially in megacities. Urban landscape negates many technological advantages US forces possess. Movement is channeled where an enemy can stage ambushes or IED attacks9. The presence of many noncombatants complicate operations.
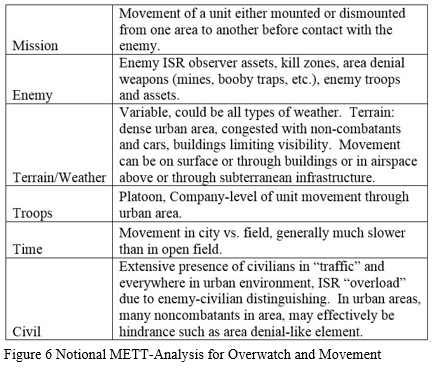
Urban situations may require use of extensive UXVs for movement and channeling, or rerouting of civilians to make way for unit movement. A goal would be to reroute traffic and pedestrians with as little disturbance as possible. Prior to operations, commanders may use ISR assets for baselining daily flows in the area of interest and then use combat support “traffic” bots with extensive use of AI cloud-based traffic simulations to efficiently reroute traffic in real-time during an operation. Civil affairs units may interface with the public using mobile phone apps, to let people know alternative routes. Another idea would be the use of construction robots for emplacement of temporary walls/barriers in a given area for channeling or for area denial. The main actions of units moving through an area are:
1. Use of terrain for protection,
2. Avoid Possible Kill Zones,
3. Dispersion to mitigate being pinned down,
4. Observation,
5. Movement with limited visibility, and
6. Use of countermeasures10.
The use of UXVs in each of these actions may be used to question the assumptions employed in movement and overwatch situations. In many instances, UGVs will not need extensive or any protection, per se, and thus can be designed to be light-weight. Furthermore, UXVs may be employed by moving units expressly as ‘running interference’ to distract adversaries who would be looking to target manned vehicles.

An example would be the use of the ‘Ripsaw’ unmanned vehicle as a roving decoy to elicit enemy fire in order to counterattack. The unit could use such UXV ‘orbiters’ for better ISR and initial contact-engagement, if needed. Use of non-lethal means would be used to move noncombatants away from the moving unit. UXVs would also be employed into kill zones for surveillance and to counterattack an enemy which gives its positions away if UXVs are engaged. Use of very lightweight and relatively cheap (i.e., sacrificial) assets would be used to bait such enemy positions. A unit’s use of vanguard or rearguard ISR UXVs for forewarning, increases situational awareness. However, use of UXVs may “announce” the unit’s arrival to the enemy. To confuse enemy troops, the use of feints and deception with UXVs should be explored. Larger UXVs owned by higher HQ (battalion+) can blanket large areas. Use of imperceptible (very small) or “perching” ISR assets could be used. Such ISR assets can leapfrog along the path of the unit’s movement.
The use of UXVs with night vision and other sensors would improve Blue units’ abilities to move during darkness. When using countermeasures, moving units would be able to deploy nonlethal suppressive fires (via UXVs) for first contact if many noncombatants are in an area. Lethal fires could be used for more precise engagement of enemy assets. Smoke obscuration robots can move around an area to get the most coverage possible. Swarms of smoke robots could be used to cloud an entire area to mask a unit’s movement or could be used for nonlethal noncombatant management.
Encirclement
Encirclement of enemy forces and objectives are a regular part of offensive operations. Generally, the idea is to cut off an enemy force from its support and then to reduce the enemy within the circle11. The enemy forces are attacked on all sides forcing them to fight or surrender. A historic example from World War 2 is when Soviet forces managed to encircle the Wehrmacht’s 6th Army and effectively destroyed it. A modern example was the battle of Tora Bora12 which was an operation to capture Osama bin Laden on the onset of the US invasion of Afghanistan. Unfortunately, bin Laden managed to escape to Pakistan. Some analysts have opined that bin Laden had not been at Tora Bora to begin with while others say he was definitely there.
If unmanned assets are used in conjunction with encirclement operations, it would enable the encirclement of enemy positions, but with less manpower required. In addition, some sectors of the ‘circle’ could be a higher ratio of unmanned assets to act as an anvil while more personnel heavy sections could be used as the hammer to engage the encircled enemy. If civilians are mixed in, the anvil section can act as a sieve to let through civilians while engaging or capturing fleeing enemy.
Ambush
When conducting an ambush as an offensive operation, the entire kill zone needs to be covered by fire. Barriers or area denial munitions are also used to keep the enemy pinned in the kill zone. The assault team is also protected by area denial tools and barriers. Support units maintain a security perimeter in order to isolate the enemy unit. After the initial assault, the lead assault team goes into the kill zone to deal with the remaining enemy combatants. Timing is essential for the ambush to ensure the element of surprise to maximize the effect of initial assault13.
When conducting a hasty ambush, a squad assumes pre-trained covered and concealed positions (with good fields of fire) upon a signal from the leader who has designated a location14.
In future operations, new concepts of ambushes may be explored. With advanced ISR, small units can prepare ambushes with advanced notice and adaptability and with less Soldiers required for a given scenario. For instance, UXVs can act as support security units while more Soldiers take part as the assault unit. Robots can also be used as moving barriers to shape the assault. Such barriers would move in order to pin down the adversary units. The use of non- lethal force and suppression could also be investigated. An example would be for a deliberate ambush of a high-value target who would be more valuable alive than dead. The ambush would primarily use non-lethal suppressive weapons on the area where the primary target is, while lethal force can be used on his support troops. In farther future scenarios, one can imagine the exclusive use of swarm robots to “swarmbush” an enemy unit, not necessarily to kill, but to mission-kill that unit’s effectiveness.
Nodal Attack
When conducting a nodal attack, a brigade-sized unit would attack and seize key city infrastructure such as bridges, airfields, radio/TV stations, power plants, and other critical infrastructure15. The mission is to rapidly attack these key “nodes” which are then followed by defensive operations to prevent their recapture by enemy forces. Timing and command and control, as well as logistics support, are challenging in these operations.
Key infrastructure, especially as part of large cities, is costly to rebuild if damaged or destroyed. If damaged or destroyed as part of urban operations, the effects would have unintended ripple effects which would spread to the population.
An example would be the seizure of a bridge. A unit starts to seize a bridge by clearing the near bank and surrounding buildings. Then, the enemy on the far side are suppressed with fires. The bridge is assaulted, and far-side bridgehead is established. The bridge itself is cleared to remove obstacles and demolitions, while a secure perimeter is established16.
Commanders can start to think of ways to use unmanned systems to their advantage when undertaking nodal attacks within an urban fight. UXVs would undoubtedly confer ISR advantages, but also be used to seize these key points. In the near term, UXVs would be used as support elements bolstering the main assault team. In the case of coordination between the elements’ logistics requirements, the use of unmanned ‘mules’ can greatly enhance the speed and effectiveness of the main assault elements.
Unmanned logistics trains can be dispatched on the ground or through the air (UAVs) to bring backup ammo, food, and other supplies (as required) to where the Soldiers are at any given point.

Use of low-collateral, reversible-effect, or non-lethal weapons for assault on infrastructure would be useful to restore these needed facilities soon after seizure. It is advantageous to deny the enemy control of the infrastructure but also not damage the city’s ‘flows.’ An example would be to deliver a quantity of slippery foam (via UXVs or special- purpose air-dropped ordnance) to a bridge in order to deny its use to the enemy but also reserve it for later allied uses. To further illustrate, UGVs with slippery foam or other slick substance could be directed to disperse while driving over the bridge. Later, when the bridge is required again for use, a deactivating or cleaning agent wouldbe used to neutralize the slick. Tunnels may be blocked by large balloons until a situation is stabilized.
Fires
When planning for Fires in conducting urban assaults on objectives, leaders endeavor to have their units engage priority targets concurrently to present multiple threats to the enemy but also to distribute fires enough so that one’s own units are not over-servicing a high priority target while neglecting others17. Generally, most, if not all, weapons used in today’s Fires are lethal and designed to be used against enemy positions.
In future scenarios, with increased use of automated systems and non-lethal/other effects on targets, more flexible ROE may be used in Fires in support of urban objectives. Conversely, use of these technologies will enhance lethality or effectiveness in some tactical situations. For example, one can more readily drop ordnance upon our own robots in “danger close” scenarios. In such a scenario, surviving friendly robots would then further engage surviving enemypositions. In the case where human Soldiers are close to the enemy, non-lethal fires suppression can be used for “danger close” situations to avoid fratricide. For instance, mal-odorants could be used “danger close” while friendly troops in gas masks would take enemy personnel by surprise. Furthermore, the use of lethal ordnance within an urban setting increases likelihood of civilian casualties. Engaging mixed populations (enemy mixed within civilian) with non-lethal effects may offer more tactical options. In support of an urban assault, usually restricted ROE artillery fires could use non-lethal options to offer suppressive effects along the planned assault routes18.
Defensive Operations
For defensive scenarios, extensive utilization of automated systems offer interesting ramifications for the future of warfare especially within a complex environment.
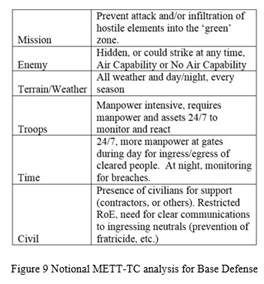
Base Defense
The most fundamental defense scenario is in the context of a Forward Operating Base (FOB) or larger base defense. The main mission of base defense is to prevent attacks or infiltration into the base by hostile elements. In the middle ages, castle defenses consisted of layers of thick, tall walls and ditches or trenches and moats. As the use of cannon and gunpowder tilted the technological advantage to the besiegers, fortifications became more complex to defend against gunpowder weapons. In modern fixed or semi-permanent bases such as Main Operating Bases or FOBs, fortifications are not as extensive because modern armaments obviate many erstwhile defensive measures. Many bases have perimeters made up of walls or berms (gabion) made of dirt/sand. In modern defense, longer range ISR assets and communications are utilized in addition to long range mutually supporting weapons to accurately engage threats. Modern area-denial weapons such as landmines or command detonated munitions may also be employed19.
In future base defense, automated ISR assets and automated responses to enemy engagements may be considered. The use of automated assets allows for more layers of defense and gradations of escalation of force. Manpower may be better diverted to defending critical areas while automated assets cover priority or general areas of the base. Last ditch defensive “third line” systems could be automated to complicate an enemy’s ability to fully occupy a ceded base.

Urban Objective Defense
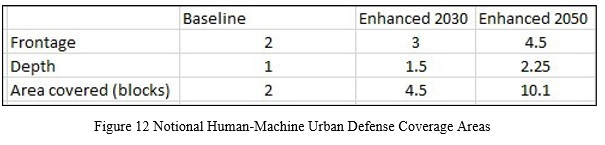
In urban settings, defending a city block from an enemy onslaught is manpower intensive. Though not as manpower intensive as offensive operations against a city, defensive measures still take up much manpower. A platoon may cover up to a 2 block by 1 block area within a representative city.
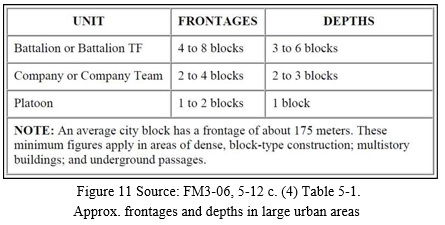
The true potential of automated systems may be seen in typically defensive roles on the battlefield. For example, using autonomous systems, commanders may be able to extend the amount of frontage and depth that a unit can typically cover defensively. At some point in the future, instead of covering a 2 by 1 block area, machine partners would just as effectively cover a 3 by 2 block area, resulting in a much-increased coverage area or conversely a smaller required unit size to cover a given area.
Autonomous assets may also be used as adaptive movable obstacles to deter the enemy or deceive enemy units. In deception operations, automatons would be very useful in order to shape the battlefield to deceive enemy commanders. For example, a commander could use robotic moving obstacles or obscuring vehicles to channel or deceive the oncoming enemy into kill boxes/ambushes.
In addition, robots would not need as much protection as Soldiers and thus could be placed in defensive positions which would be untenable for Soldiers to hold or escape from. In the case of delaying the enemy as a defensive measure, these tactics, in addition to others, may be used to slow an approaching adversary’s advance more effectively.
In defending an area, even an urban area, defenders can extensively use the environment and other tools to slow the advance of approaching opposing forces.
From Field Manual FM 3-06 on urban combat, “The third obstacle belt is the defensive position's denial belt. It consists of wire obstacles placed around, through, and in the defensive buildings and close-in minefields as well as in subterranean accesses. It impedes and complicates the enemy's ability to gain a foothold in the defensive area. Command-detonated Claymores should be used extensively. Claymores should be placed so as not to cause friendly casualties when detonated."20
In the future fight, defenders may be able to use “smart” obstacles which move upon orders or automatically based on conditions. For example, “smart rubble” or barriers could move themselves or act as phalanx walls to provide real- time effects (blocking, channeling, etc.) in areas of engagement. In another instance, automated large machines could move materials existing in the environment to expeditiously create barriers for defense and to disrupt enemy movement.
In future breaching operations, autonomous or semi-autonomous UGVs equipped with breaching tools would be utilized to breach walls or obstacles. On-board sensors would be able to sense the media which is being worked through and adjust the use of tools to breach the obstacle by the fastest means. Increasingly, autonomous machines will be used by engineers to clear away area denial weapons (landmines) or obstructions. Minefields and routes would be scanned and demined/cleared autonomously. Rubble-clearing robots could be used to clear out rubble in war-torn cities. In future scenarios, area-denial tactics, bridges, airfields, and tunnels all could be utilized to enable coalition mobility while denying the enemy mobility. For example, a “smart airfield” could employ a field of bots on an airstrip which can move out of the way for Blue landings while denying safe landings for other aircraft.
Humanitarian Assistance and Stability Operations
Disaster recovery operations are highly manpower intensive and put first-responders in dangerous situations. Increasingly small drones are being used for search and rescue operations. More capable robots may help in debris search and removal operations after earthquakes or automatic sandbagging bots can be used to fill and emplace sandbags for flood control. Autonomous systems can be used in chemical, biological, radiological and nuclear (CBRN) environments which would be hazardousto human life. Automated or semi-automated construction robots could be used to build or even ‘print’ temporary shelter21 for displaced persons after disasters have destroyed homes.
During stability operations22, automation of jobs which troops or allies would perform would alleviate some of the burden to keep peace. For instance, during checkpoint operations, some drivers do not understand instructions, fail to stop, and then are engaged lethally. When utilizing autonomous checkpoints, less lethal means may be able to mitigate this collateral damage or give more standoff from troops in order to give due warning. Future mobile ad hoc checkpoint UGVs may be able to set-up hasty or snap checkpoints in more locations than can otherwise be resourced with limited numbers of troops23. Advanced scanners may enable standoff interrogation of passing vehicles or people without undue delay.
Human-machine teaming would allow new concepts for crowd management. Some research has already been done on investigating delivery of riot control agents from aerial drones. Several companies are already selling aerial drones which can deliver riot control agents to rioting crowds24. More advanced concepts could employ UGV robots to cordon and channel rioters out of an area25.
Subterranean Operations
In subterranean operations26, many operations may be simplified by using unmanned assets. Mapping of unknown underground areas in urban environments is essential to the defense of an area from enemy encroachment via underground conduits. Autonomous UXVs can give situational awareness of hazards from below. In offense against defenders in tunnels, “tunnelbots” could be used to reconnaissance and find booby traps or apply smoke to flush out defenders. Unmanned “patrolbots” with sensors could be used to detect tunnels or incursions. Reconnaissance UXVs may use underground areas as bases of operation to find valuable intelligence on enemy surface-side locations and operations.
Conclusions and Recommendations for Future Research
Within the next 30 years, approximately 66% of the world’s population will dwell in cities, many of which lie on strategic terrain. Urban landscapes are one of the most challenging arenas to conduct military operations. Situational awareness and communications are difficult while adversaries hide within the city. By taking advantage of technological trends, new paradigms of urban military operational concepts will need to be attained in order to be able to accomplish national strategic and tactical objectives. Specifically, automation of aspects of military operations may open doors to new tactical concepts.
It is recommended that studies and experiments be made to explore the use of fully autonomous air and ground platforms for non-lethal battlefield shaping, and to research implications or possible futures in which the use of fully autonomous platforms for non-lethal engagement may increase overall unit ‘lethality’ (i.e., effectiveness) when teaming with manned lethal systems. Quantitative studies and simulations would explore scenarios in which autonomous platforms can replace landmines for area-denial to more complex scenarios such as the use of non-lethal/lethal teaming to segregate combatants from non-combatants. Advanced scenarios include swarming or deception operations amongst and within buildings and subterranean environments or the use of non-lethal means to channelize enemy combatants into kill boxes. Simulations and experiments in the use of autonomous systems to map and clear buildings and subterranean areas should be undertaken. Analysis of degraded environments (visibility, communications-failure, degraded location awareness) would also be examined. Relative merits of the use of airborne and ground-based platforms amongst a variety of urban landscape types could be explored as well.
References
1. The Paradox of Nonlethal Weapons - Fritz Allhoff - http://www.slate.com/articles/technology/future_tense/2012/11/nonlethal_weapons_and_the_law_of_war.html
2. How the Red Cross Killed Non-Lethal Weapons - Gary Anderson - http://www.wsj.com/articles/how-the-red-cross-killed-non-lethal-weapons-1466635269
3. China Debuts Anbot, The Police Robot - Jeffrey Lin and P.W. Singer - http://www.popsci.com/china-debuts-anbot-police-robot
4. Police in India Now Have Drones That Can Shower Unruly Crowds with Pepper Spray - John Dyer - https://news.vice.com/article/police-in-india-now-have-drones-that-can-shower-unruly-crowds-with-pepper-spray
5. Graham, Stephen. (2010) Cities Under Siege: The New Military Urbanism. New York: Verso, Page 160.
6. United States (2006). Combined Arms Operations in Urban Terrain: Army Field Manual 3-06, Washington, D.C.: Headquarters, Dept. of the Army. Section III. Clearing, 3-17
7. COIN Manpower Ratios: Debunking the 10 to 1 Ratio and Surges - Joshua Thiel - http://smallwarsjournal.com/print/10117
8. “Punished for Telling Truth about Iraq War” (March 20, 2013) - Nicolaus Mills - http://www.cnn.com/2013/03/20/opinion/mills-truth-teller-iraq/
9. Gordon, John, John Matsumura, Anthony Atler, Scott Boston, Matthew E. Boyer, Natasha Lander and Todd Nichols, Comparing U.S. Army Systems with Foreign Counterparts: Identifying Possible Capability Gaps and Insights from Other Armies, Santa Monica, Calif.: RAND Corporation, RR-716-A, 2015. As of December 18, 2017: https://www.rand.org/pubs/research_reports/RR716.html
10. United States (2002). Tactical Employment of Anti-Armor Platoons and Companies: Army Field Manual 3-21.91, Washington, D.C.: Headquarters, Dept. of the Army. Ch. 3
11. United States (2001). Tactics: Army Field Manual 3-90, Washington, D.C.: Headquarters, Dept. of the Army. Appendix D Encirclement Operations
12. Battle of Tora Bora. (2018, January 12). In Wikipedia, The Free Encyclopedia. Retrieved 14:27, January 12, 2018, from https://en.wikipedia.org/w/index.php?title=Battle_of_Tora_Bora&oldid=81996601
13. United States (1992). Infantry Rifle Platoon and Squad Field Manual 7-8, Washington, D.C.: Headquarters, Dept. of the Army. Ch. 3-17
14. Ibid. Ch. 3-18
15. United States (2006). Combined Arms Operations in Urban Terrain: Army Field Manual 3-06, Washington, D.C.: Headquarters, Dept. of the Army. Ch. 4-32
16. Ibid. Ch. 4-40.a.
17. Ibid. Ch. 4-41.a
18. Ibid. Ch. 4-39.b.
19. United States (2001). Tactics: Army Field Manual 3-90, Washington, D.C.: Headquarters, Dept. of the Army. Appendix E Rear and Base Security
20. United States (2006). Combined Arms Operations in Urban Terrain: Army Field Manual 3-06, Washington, D.C.: Headquarters, Dept. of the Army. Ch. 5-12.c (7) (c)
21.“Robotic drones to 'print' emergency shelters for those in need” http://phys.org/news/2016-02-robotic-drones-emergency.html
22. United States (2008). Stability Operations: Army Field Manual 3-07, Washington, D.C.: Headquarters, Dept. of the Army.
23. United States (2003). Army and Marine Corps Tactics, Techniques, and Procedures for Stability Operations and Support Operations, Fort Leavenworth, KS: U.S. Army Training and Doctrine Command. Section II Checkpoint Operations.
24. Riot control drone armed with paintballs and pepper spray hits market https://www.rt.com/news/167168-riot-control-pepper-spray-drone/
25. Tear Gassing by Remote Control http://remotecontrolproject.org/wp-content/uploads/2015/12/Tear-Gassing-By-Remote-Control-Report.pdf
26. United States (2006). Combined Arms Operations in Urban Terrain: Army Field Manual 3-06, Washington, D.C.: Headquarters, Dept. of the Army. Appendix J Subterranean Operations